ESET 349 Final Project
Automated Trash Bin
The goal of this project was to automate a task using the TI MSP432P401R microcontroller. In this project, my team and I developed an automated trash bin that operates based on user input, that is, hand motion. The automated trash bin opens and closes when the infrared obstacle detector detects motion. In addition, when the trash bin is not full the blue LED will turn on, and when the trash bin is full the red LED will turn on. I helped with the majority of the code, and assembly of the project.
Team: Aaron Luna and Richie Dygert
Physical Structure
For the physical model, the physical trash bin was bought through Amazon. A mini rotary drill was used to make the necessary cuts to install the motor, infrared obstacle detectors, LEDs, and wires to the trash bin. A small hole was made in the trash bin lid to insert the shaft of the motor.

Programming
& Electrical
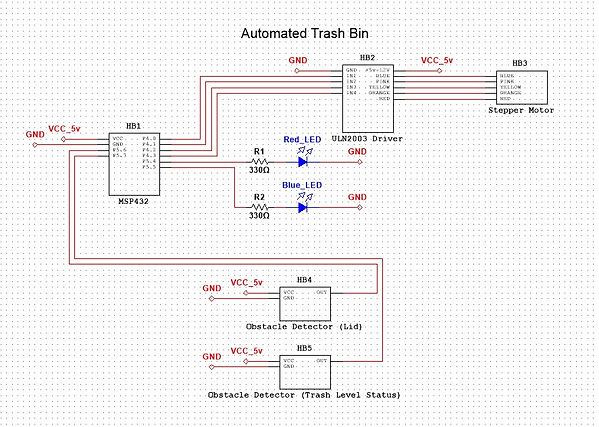
On the image to the right is a block diagram of the trash bin program. The schematic of the circuit for the physical model can be seen in the image below. The electrical segments of this project can be found in the links below.





Microcontroller Code
